|
Having wanted to have a FPV plane for a while, I decided to use the Bushmule v2 from Avios.
it provides a canopy for FPV flight, and has enough space to mount the flight controller and all sensors required for a decent setup.
Putting the pieces together was quite easy. All that was really required was to force a little on the wing connectors. Albeit not "exact" here, but as it is EPO, it could be forced into position.
For the rest, make sure all connections are set was the easy part.
Inserting the flight controller and sensors was a little more complex, as I didn't want to completely ruin the aerodynamics (as seen on some FPV builds).
After deciding what sensors I would use, and where I'd place the FC, I started "gluing" the pieces in. Note that for a EPO type plain, a heat-gun pistol is the best tool there is!
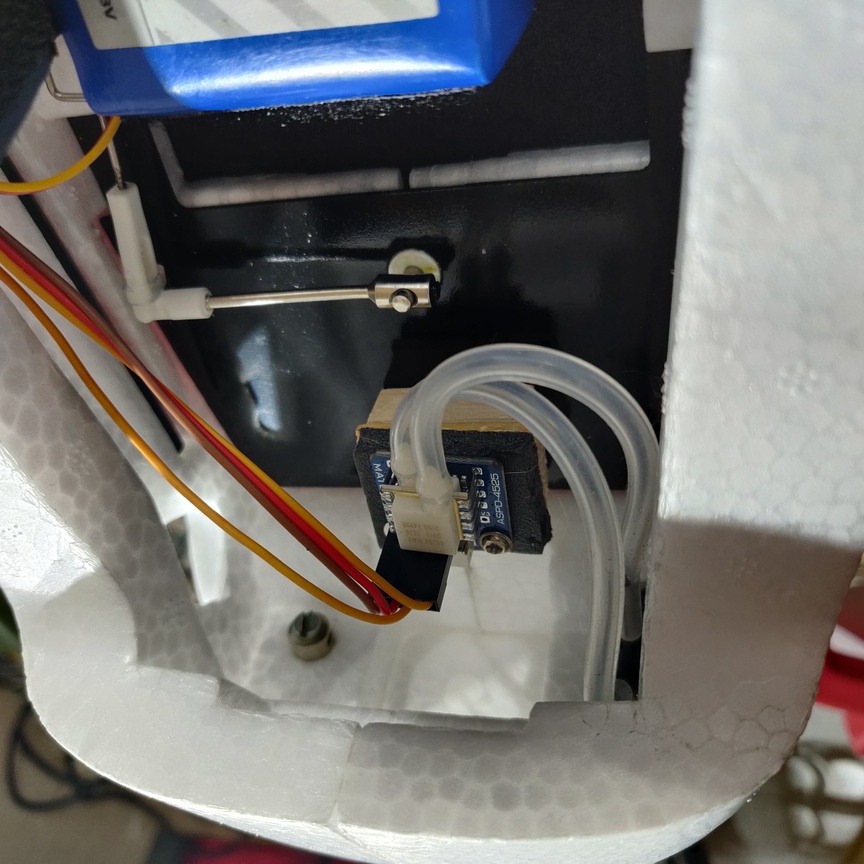
Pivo tube and electronics
The pivot tube went straight into the "nose" of the bushmule. See pictures below:

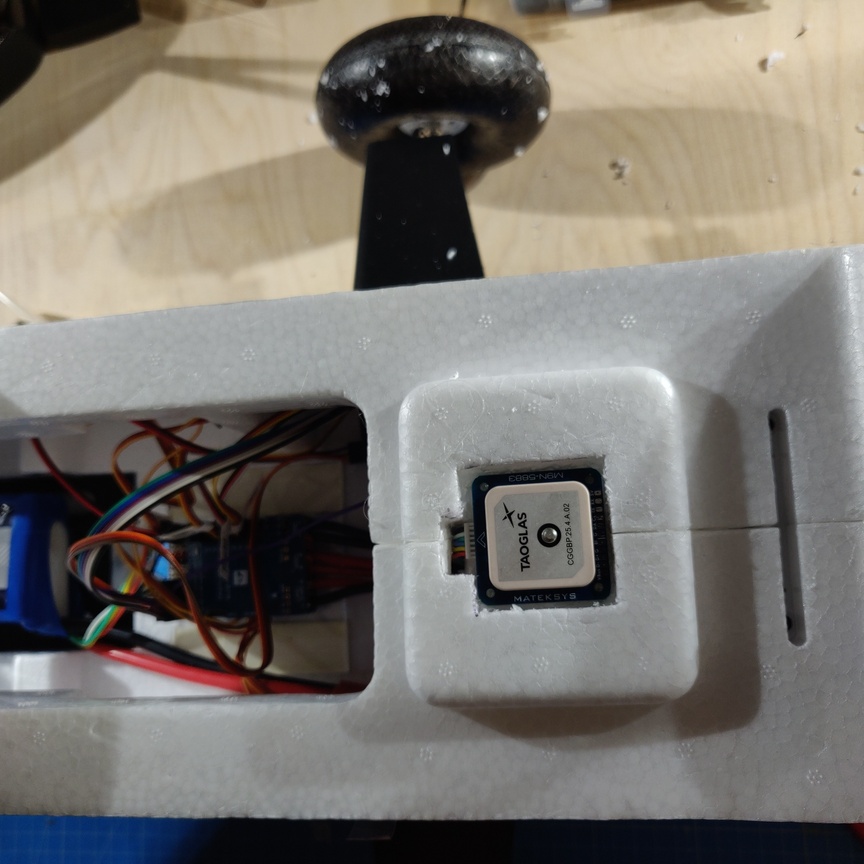
The GPS went
went straight into the Wing-Mount. Note that the EPO won't stop the signal from reaching it nicely.
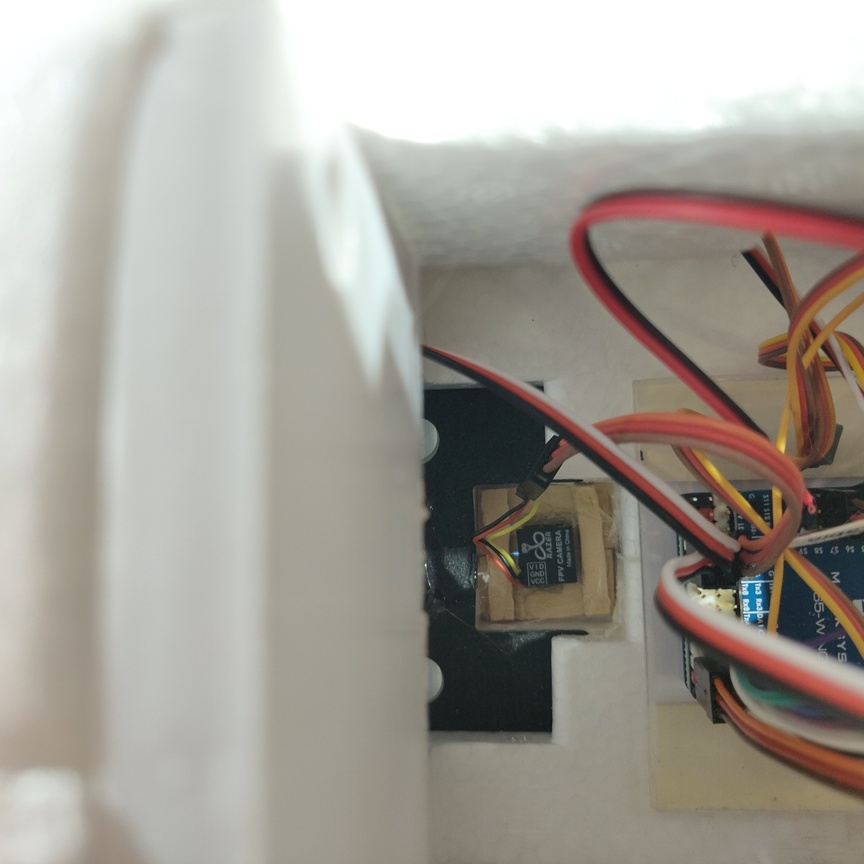
The Video subsystem
We'll be using 2 cameras. One to the front, upper cabin camera, and one right through the bottom of the plane showing what is happening under the plane.
Front camera:

Bottom camera, top view:
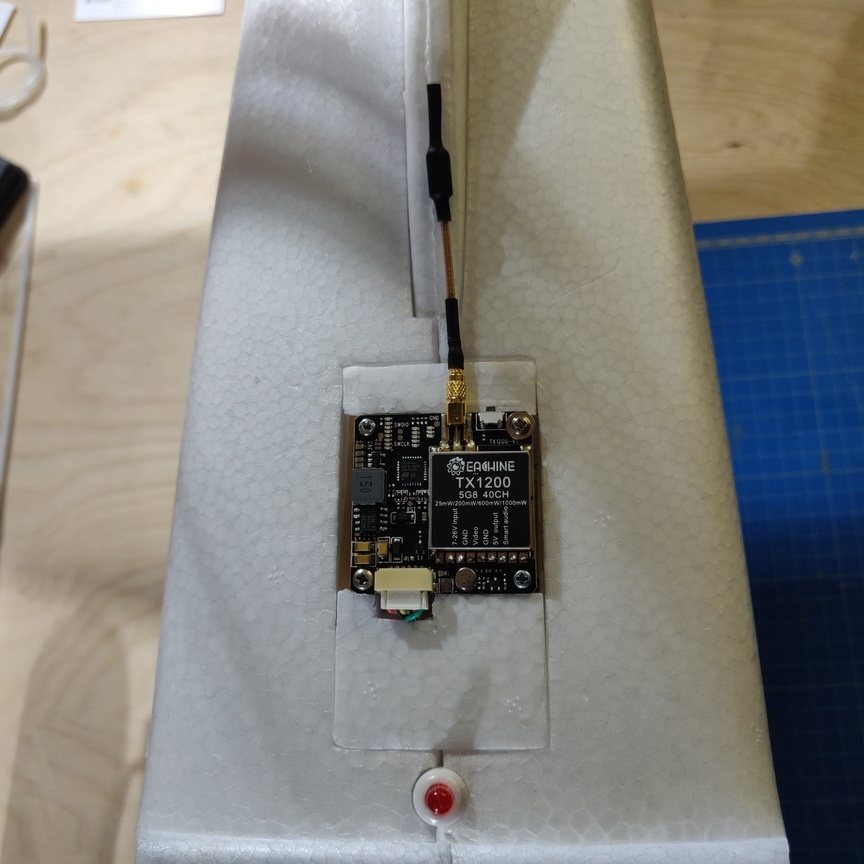
And the Video Transmitter:
The flight controller
This one has been installed in the CG (there is space for that actually).
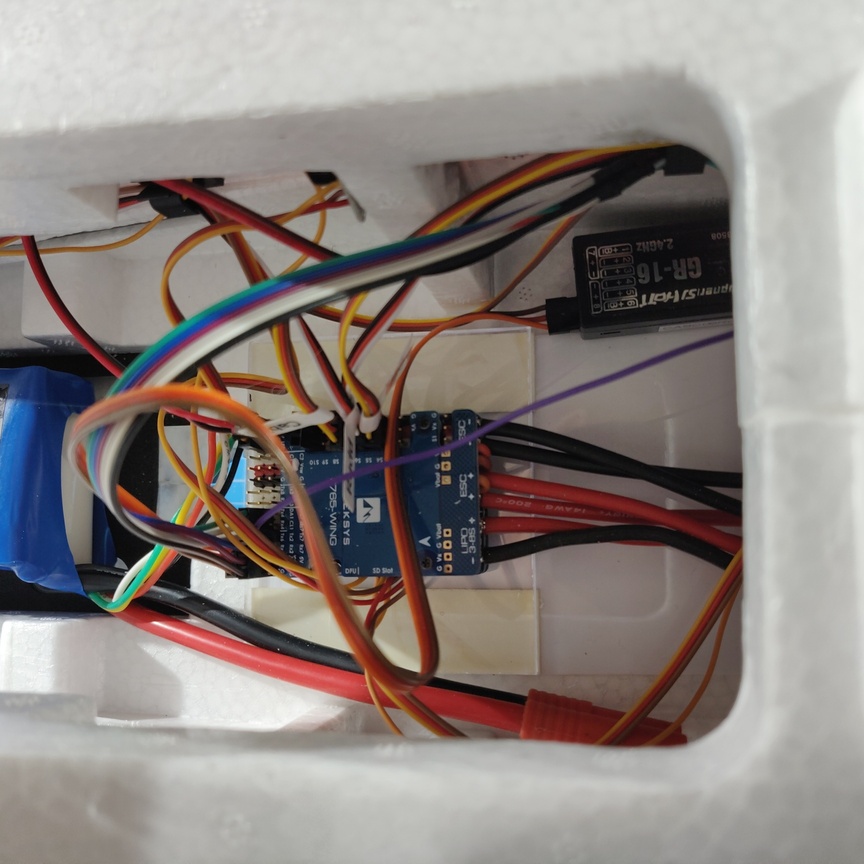
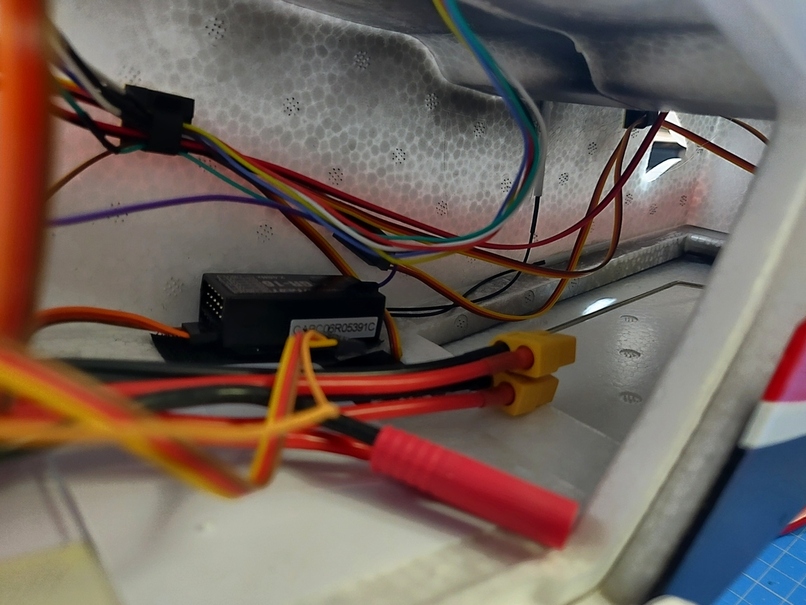
The Receiver on the side
hoping it won't affect too much the Magnetometer in the GPS
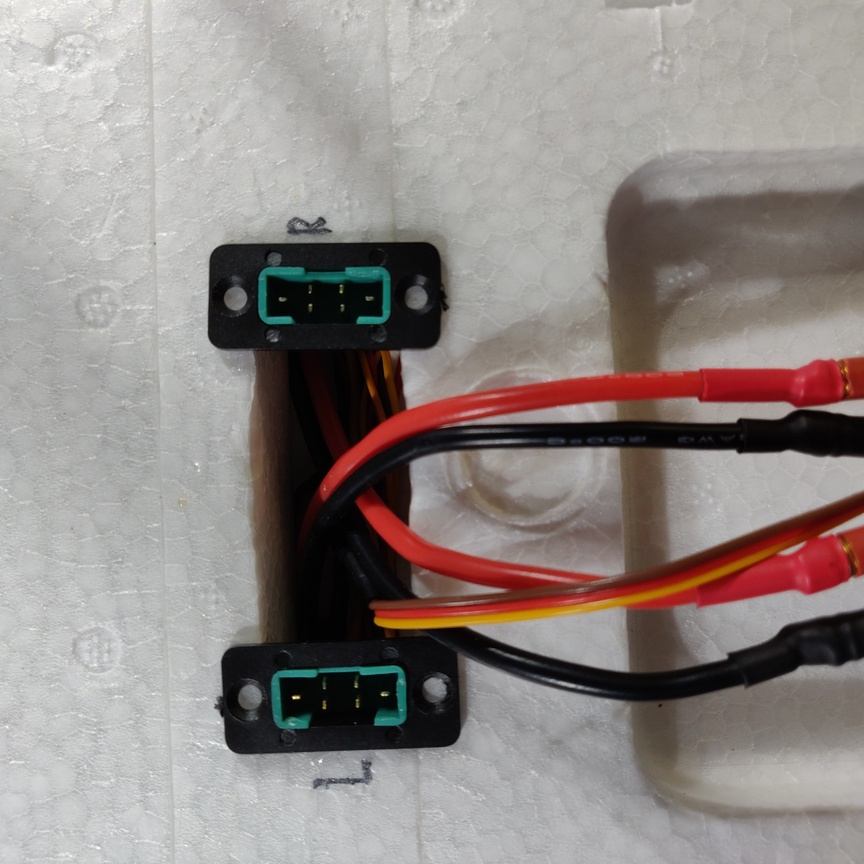
Wings
The cables that need to be connected from the Wings to the flight controller are a mess.
2 Flaps, 2 Aileron, 2 ESC control + 2 Reverse ESC + 2 ESC Battery, 2 Lamp. Total = 12 cables.
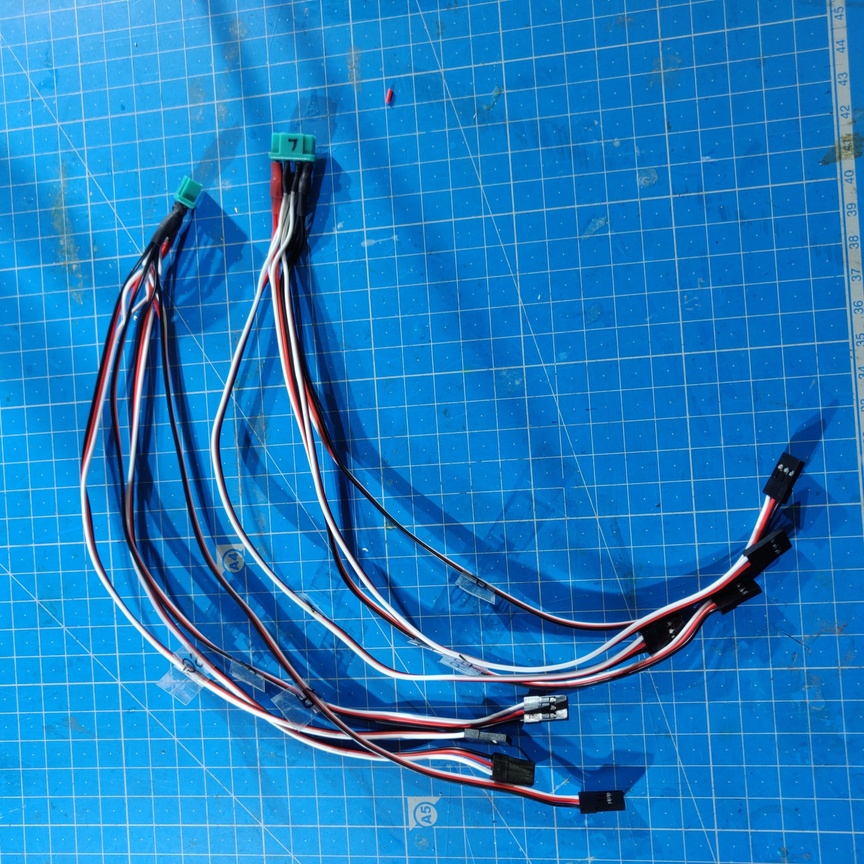
Used 2 Multiplex connectors and soldered it all together. This way, each wing side has its connector with Aileron, Flap, ESC + ESC REV. Makes it much easier.
and the connection cables
|
